فاپول
فروشگاه ها
دسته بندی ها
فایل ها
وبلاگ
تماس با ما
فاپول
فروشگاه ها
دسته بندی ها
فایل ها
وبلاگ
درباره ما
تماس با ما
ساخت فروشگاه فایل
فروش اشتراک و لایسنس
ورود | ثبت نام
ساخت فروشگاه فایل
فاپول
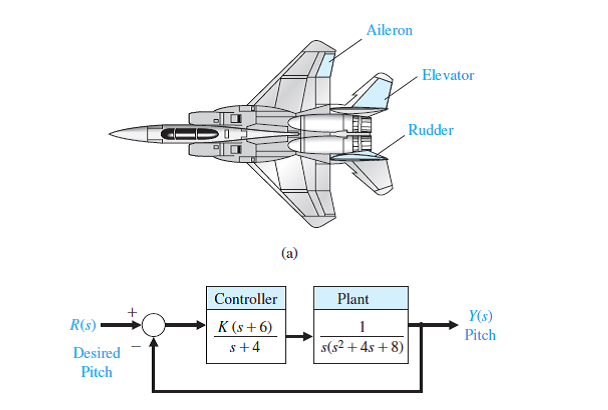
پاورپوینت الگوریتم کنترل مد لغزشی تطبیقی برای ربات موازی کابلی نیمه مقید
پاورپوینت الگوریتم کنترل مد لغزشی تطبیقی برای ربات موازی کابلی نیمه مقید
2 فایل
جزوه کامل کنترل مدرن
فروشنده :
RABOFAIL
19,000 تومان
پاورپوینت الگوریتم کنترل مد لغزشی تطبیقی برای ربات موازی کابلی نیمه مقید
فروشنده :
دنیای فایل
15,000 تومان