برای ساختن یک ربات باید آشنایی مقدماتی با ۳ رشته مکانیک ، برنامه نویسی و الکترونیک آشنایی داشته باشیم البته نیازی نیست در تمامی این رشته ها خود تسلط داشته باشیم چنانچه شما عضو یک تیم هستید هریک از اعضای تیم باید در مهارت خود تسلط داشته باشند تا شما به نتیجه دلخواه و ایده آل خود برسید .

ربات مسیریاب، رباتی است که میتواند خطوط را تشخیص داده و آنها را دنبال کند و هر زمان که خطوط تغییر مسیر دادند، ربات مسیریاب نیز مسیر خود را همراه با خطوط تغییر میدهد. معمولا این نوع رباتها، ساده ترین نوع رباتهای شناخته شده هستند و انتخاب بسیار مناسبی برای افراد تازه کار و علاقه مندان به یادگیری رباتیک (در خط مهندسی بخوانید :
رباتیک چیست؟
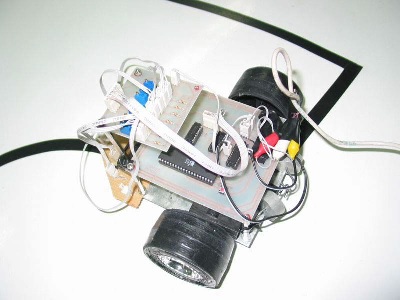
. ساخت این نوع ربات علاوه بر اینکه بسیار جالب و سرگرم کننده است، باعث میشود تا مهارتهای برنامه نویسی و الکترونیک شما افزایش پیدا کند. شما میتوانید یک ربات مسیریاب ساده بسازید که خطوط مشکی یا سفید رسم شده روی زمین را دنبال کند یا اینکه میتوانید ربات پیشرفتهتری طراحی کنید که خطوط با رنگهای مختلف را شناسایی کند و فقط یک رنگ خاص را دنبال کند. بدون در نظر گرفتن اینکه قصد ساخت کدام نمونه ربات مسیریاب را دارید، تمام این رباتها دارای ویژگیهای مشترکی هستند. این رباتهای هوشمند همگی از چرخ یا شنی و از دو موتور یا بیشتر برای سیستم حرکتی و از سنسورها برای تشخیص خطوط استفاده میکنند. همهی این رباتها برای استحکام، دارای شاسی هستند و از یک برد الکترونیکی به عنوان مغز متفکر ربات استفاده میکنند. ربات مسیریاب ماموریت ساده ای دارد، “دنبال کردن خطوط “. این رباتها را میتوان با کمترین منابع ساخت و نیازی به مهارتهای الکترونیکی و برنامه نویسی بالا برای ساخت این نوع ربات وجود ندارد. کاربرد ربات مسیریاب یکی از کاربردهای عمده این ربات، حملونقل وسایل و کالاهای مختلف در کارخانجات، بیمارستانها، فروشگاهها، کتابخانهها وغیره میباشد. ربات مسیریاب تا حدی قادر به انجام وظیفه کتابداری کتابخانهها میباشد. به این صورت که بعد از دادن کد کتاب، ربات با دنبال کردن مسیری که کد، آن را تعیین میکند، به محلی که کتاب در آن قرار گرفته میرود و کتاب را برداشته و به نزد ما میآورد. از این ربات در کارخانهها برای جابهجا کردن ابزار و ساماندهی وسایل مورد استفاده قرار میگیرد. برای مثال در آمازون برای جابهجایی وسایل مورد استفاده قرار میگیرد. مثال دیگر کاربرد این نوع ربات در بیمارستانهای پیشرفته است، کف بیمارستانهای پیشرفته خط کشیهایی به رنگهای مختلف به منظور هدایت رباتهای مسیریاب به محلهای مختلف، مثلا رنگ قرمز به اتاق جراحی یا آبی به اتاق زایمان، وجود دارد. بیمارانی که توانایی حرکت کردن و جابهجا شدن را ندارند و باید از ویلچر یا تخت استفاده کنند، این تخت نقش ربات را دارد و بیمار را از روی مسیر مشخص به محل مطلوب میبرد.
بحث ما شامل سه بخش است :
۱- مکانیک
۲- الکترونیک
۳- برنامه نویسی
مکانیک
درمکانیک یک ربات مسیر یاب چند بخش وجود دارد مکانیک ربات مسیر یاب جزء ساده ترین مکانیک ها محسوب می شود این مکانیک شامل بخش های زیر است .

۱- شاسی (یا بدنه ) که تمام اجزاء روی آن قرار خواهند گرفت
۲- موتور ها
۳- چرخ ها
۴- برد سنسور
نکات مهم درباره کانیک و نوع بستن آن
۱- حتماً مکانیک کاملا محکم بسته شود
۲- چنانچه از چسب استفاده می کنید سعی کنید از چسب به همراه بست استفاده کنید
۳- برای اتصال برد ها به بدنه اصلی حتماً از پیچ و مهره و یا Spacer و مهره استفاده کنید
۴- برای محکم شدن اتصالات و جلوگیری از بازشدن آنها از واشر فنری استفاده کنید
و ...
الکترونیک
نکته :
۱- سعی کنید از فیبر های سوراخ دار برای برد اصلی استفاده نکیند به این دلیل که سیم های زیادی استفاده می شود و چنانچه یک سیم قطع شود ربات شما به درستی کار نمی کند
۲- به این نکته توجه داشته باشید مدار الکترونیکی شما حتما در مقابل نویز مقاوم باشد چون مدار درایور موتور و dc موتور ها نویز شدیدی در مدار ایجاد می کنند.
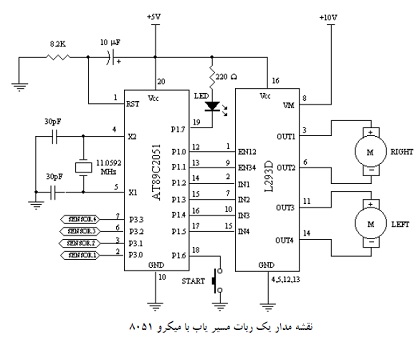
الکترونیک مدار ربات مسیر یاب از بخش های زیر تشکیل شده است :
۱- مدار تغذیه
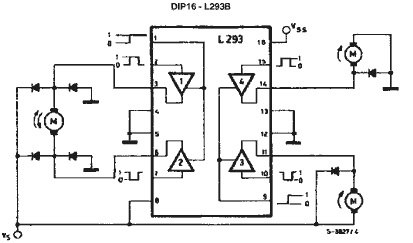
۲- مدار درایور موتور
۳- بخش خروجی ها
۴- میکروکنترلر
۵- مقایسه گر های آنالوگ
۶- مدار برد سنسور

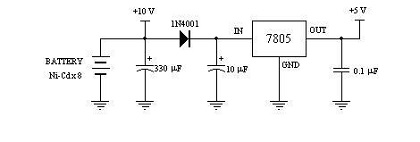
مدار تغذیه :
این بخش از مدار وظیفه تبدیل ولتاژ ورودی مدار به برق ۵ ولت را برعهده دارد برق مدار شما باید ۵ ولت باشد به این دلیل که میکرو کنترلر شما و اکثر المان های برد با برق ۵ ولت کار می کنند.
بخش های ورودی و خروجی
میکروکنترلر
میکرو کنترلر در حقیقت مغز ربات ما می باشد و طبق برنامه که ما به آن می دهیم ربات را کنترل می کند یعنی شامل فرایند دریافت ورودی از سنسور ها ، پردازش توسط برنامه ای که ما برای آن مشخص کرده ایم و خروجی دادن به موتور ها می شود میکرو هایی که معمولا در ربات های مسیریاب استفاده می شود از ۲ خانواده هستند.
سنسور های مادون قرمز
برنامه نویسی
برنامه یک ربات مسیریاب می تواند شامل چند بخش باشد که آنها را توضیح می دهیم
۱- خواندن وضعیت از سنسور ها
۲- تصمیم گیری ( پردازش اطلاعات )
۳- فرمان دادن به موتور ها
یک مثال برای کنترل ربات با ۵ سنسور در ساده ترین حالت

مشخصات فایل چگونه ربات مسیر یاب بسازیم؟
فر مت فایل : PDF
حجم فایل : ۱٫۰۴ مگابایت
تعداد صفحات : ۱۴ صفحه
زبان : فارسی





دیدگاه خود را ثبت کنید